

Track Actuator Analysis Rig
SURI Summer 2023 Project
For this project, I was tasked to create a test rig to test the motor and flexible track characteristics for a bigger research project being done in the Stanford SHAPE Lab. The purpose was to explore the possibility of using active center nodes by discovering tradeoffs between motor torque and curvatures generated. Additional goals included determining the role of boundary conditions on the shapes and curvature generated and to determine if the motors can hold shapes while not powered.
SURI 2023 Final Poster: HERE
Physical Assembly: Track Manipulation
Electromechanical Methods
Circuit design utilizing Teensy LC and shunt resistor to calculate current draw from the motor
Encoder and motor characteristics used to calculate motor RPM and estimate mechanical output torque
State machine used for reliable repetition and ease of use when testing between different boundary condition
Software
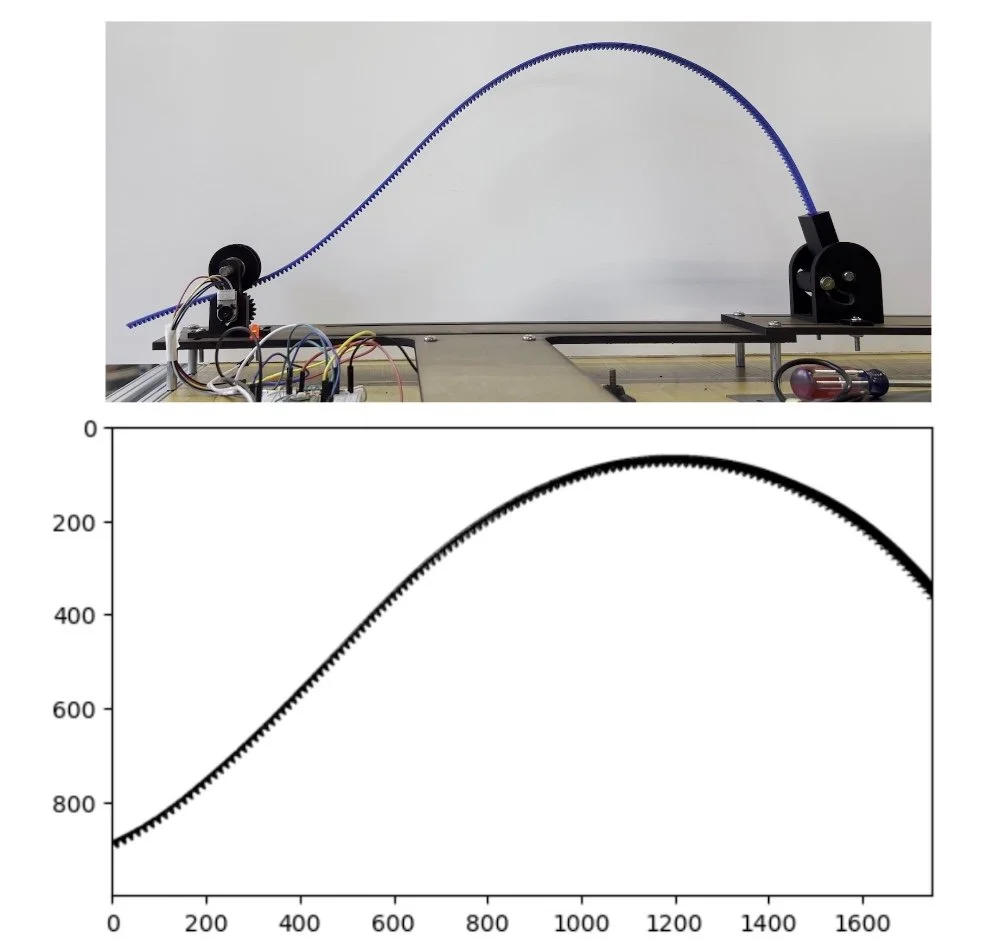
Wrote an image processing script in Python capable of measuring the height and shape and curvature of the track at each frame in the video
Arduino Program operates testing via state machine and records time, voltage, current, torque, work, distance extruded, height, track coordinates. This data is combined with image data to comprise individual test CSV
Matlab script visualizes data from CSV and uses track coordinates to calculate curvature for each frame.
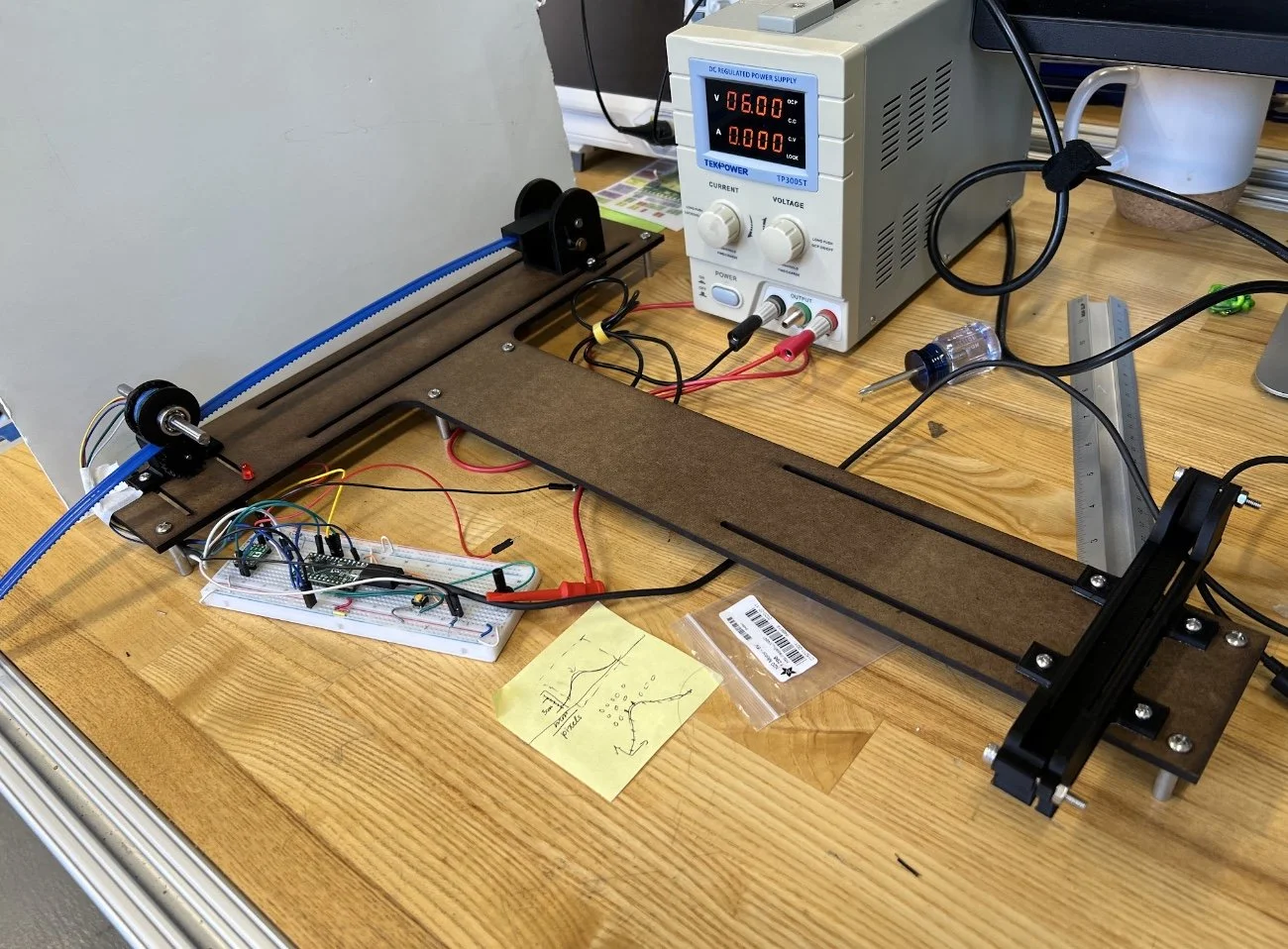
Mechanical Design involved a geared extrusion attachment for the motor to extrude the elastic track horizontally.
Adjustable end piece allows for distance conditions between 250mm and 450mm, and angles between 0 and 90 degrees, or a free pin joint
The test rig involves a rigid connection and an adjustable phone mount to allow repeatable video recording of the test in front of a white backdrop. This allows for reliable and repeatable image processing
3D printed parts for rapid iteration and conformable design
Results

Torque increases as angle decreases, and loosely follows the speed at
which curvature change
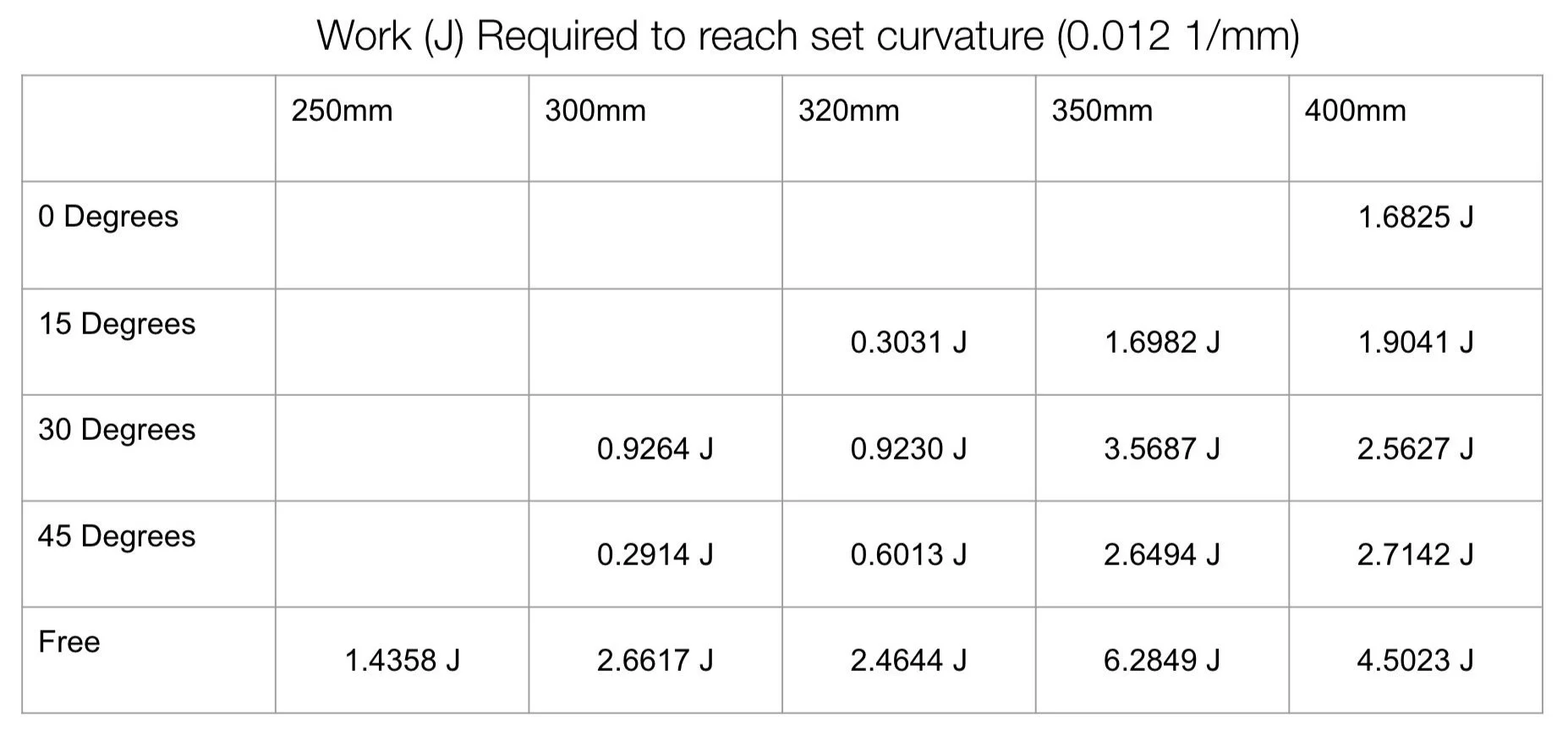
Work increases linearly over time, less dependent on curvature
changes and more dependent on speed to create set curvature
Power Drawn to create certain curvatures dependent on both the
angle and distance of the end condition
More distance = more power
Shallower angle = more power
1:298 gear ratio motors are generating ~0.0275 1/mm curvature
before stalling
Minimum distance to create significant curvature using the tracks
without stalling = 250 mm
Motors held without power under all conditions/curvatures they were
subjected to