

One Trip Wonder
Design for Additive Manufacturing Final Project: Generative Design Handle


Design Objective
The goal of this project is to use knowledge of design for additive manufacturing, 3D modeling tools and techniques, and knowledge of material properties to create a physical product that leverages the strengths of additive manufacturing.
I chose to create a product using Algorithmic Modeling. The objective of this technique is to design a part using shape optimization, generative design, or latticing to improve strength to weight ratio without sacrificing performance.
The mechanical function of this part is to allow the user to hold multiple bags or items easily with a single hand. This product consolidates multiple handles into one.
The User is anybody who is grocery shopping, running errands, or needs to carry multiple bags at a time.
Conceptualization
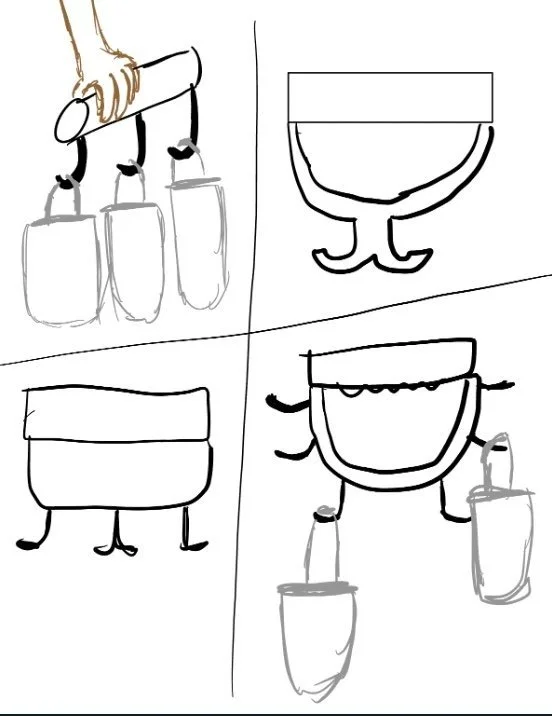
The design will use multiple hooks connected to a single handle in order to carry many bags with a single hand
The product will be created using generative design to create an optimized and lightweight product that can withstand the weight of multiple grocery bags
Rapid Prototyping

Measurements were done on the hand to estimate what would make for an ergonomic shape, but physical prototypes helped get a true feel. This first PLA printed handle had grooves that were a bit too far apart and a bit too deep for comfort. The final iteration addressed these problems.

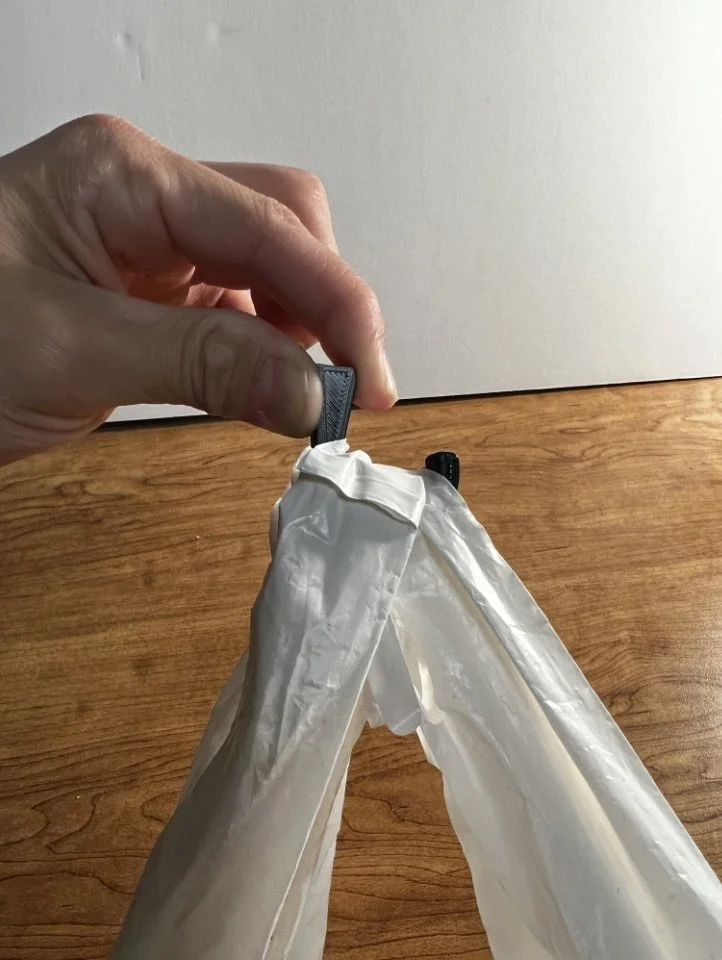

The hook was prototyped to ensure that it would be big enough to hold a standard grocery bag without slipping off. The size of this PLA printed prototype was correct, and the final iteration used the same dimensions.
Material Choice

The Material I chose for the final product, which I would also use for simulations and Generative Design, was Grey Pro. This is because according to the Formlabs Website, Grey Pro Resin is highly resistant to deformation over time, and is very suitable for printing parts intended for repeated use or handling. The grocery bag holder will be subject to heavy loads, and repeated use. Grey Pro also features a higher ultimate tensile strength and a higher modulus than tough 2000, which was another material I was considering. Using the Formlabs resin printer will also allow me to keep very high resolution on my part.
CAD + FEA Simulation
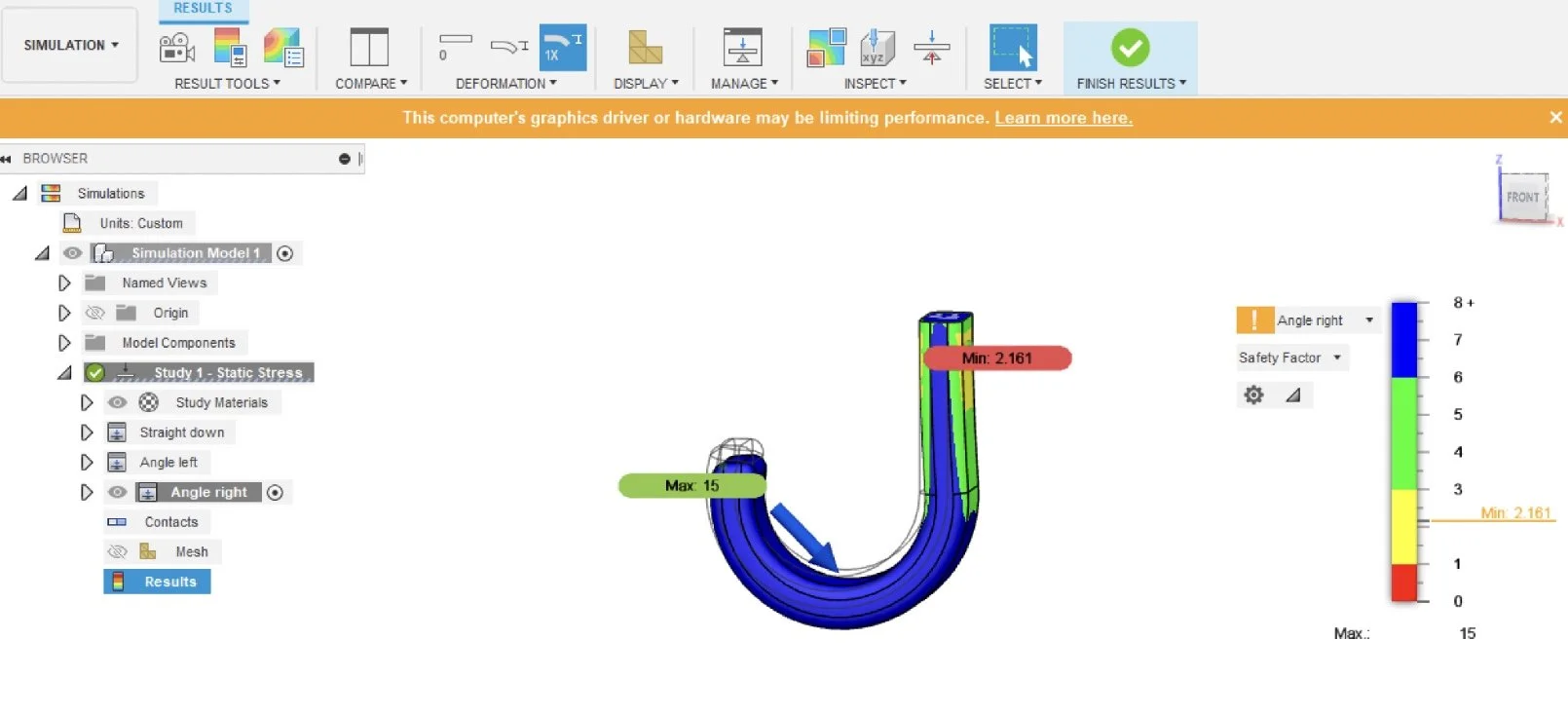
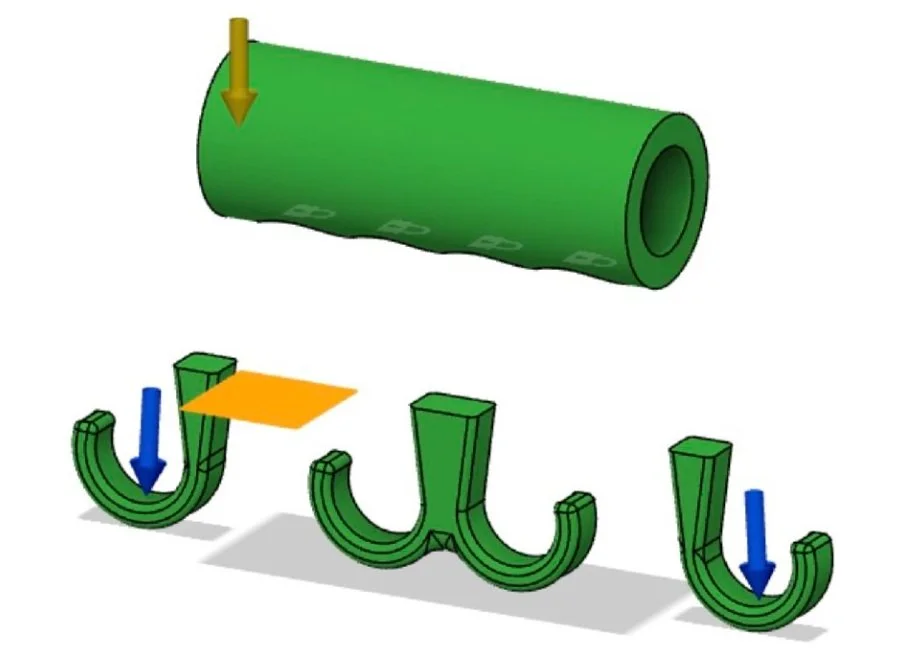
Simulations were performed on the hook design, and design changes were implemented appropriately. For the study material, tough 2000 was used as the base material, and mechanical properties were modified using values of Grey Pro from the Formlabs website. The top of the hook is fixed, and three load cases were applied at different angles using 26.7 N of force (the approximate weight of a grocery bag). This 2.1 safety factor was deemed too low, and the hook was modified to be safe.
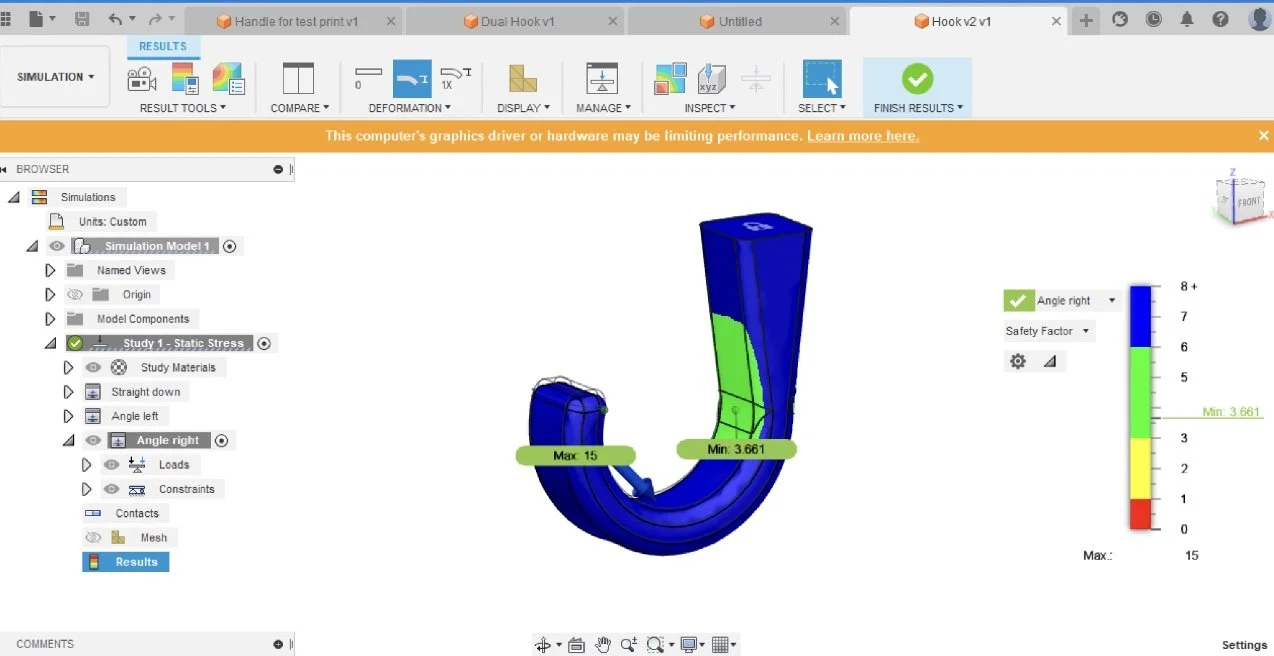
Final hook simulation, using same loading conditions and material as the first simulation. The minimum safety factor of 3.6 was deemed safe to print.
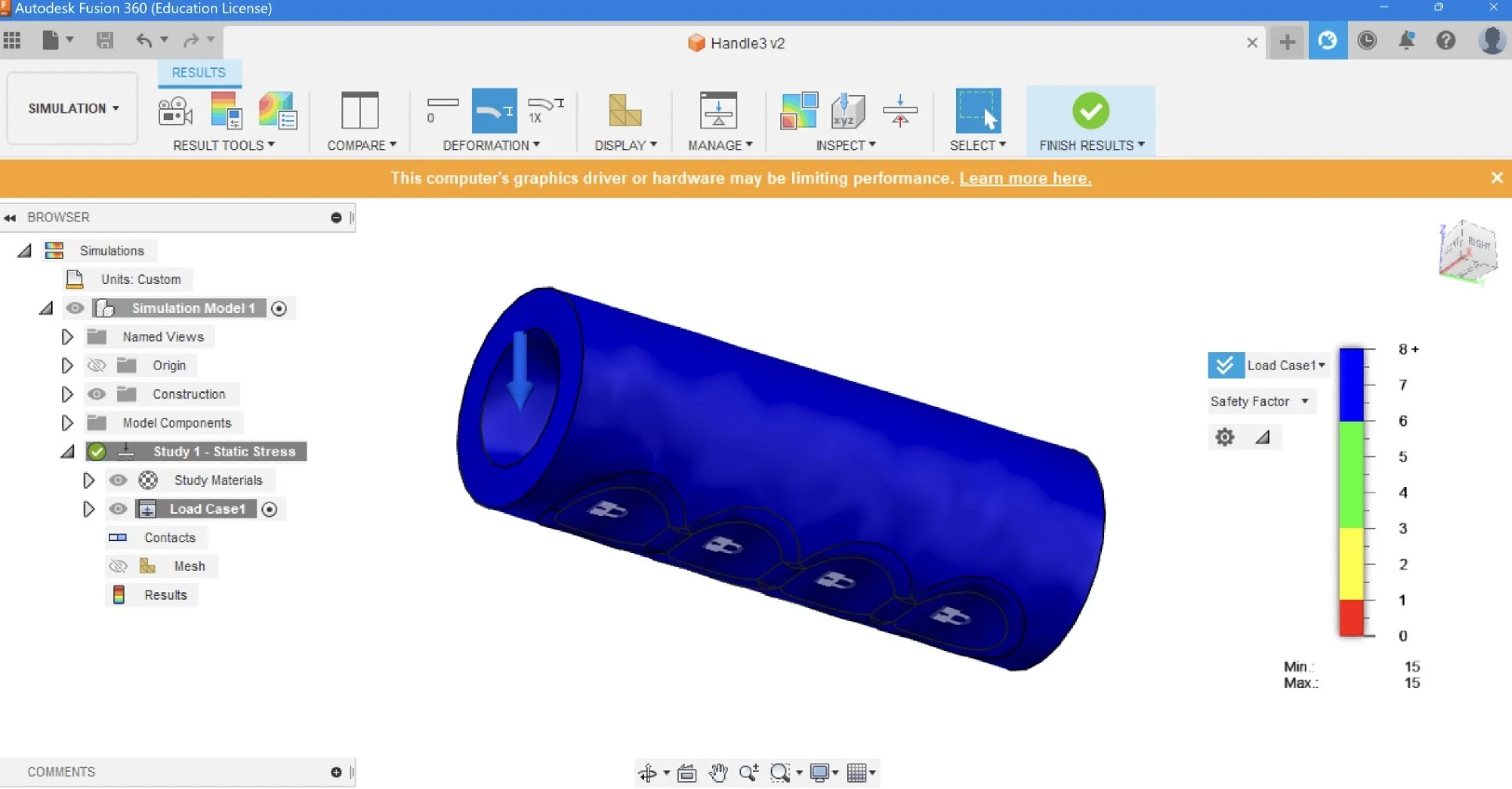
Static constraints were placed on the finger dents, and a load of 53.4 N was applied to each side of the handle. The minimum factor of safety was 15. The material for this simulation was the same Tough 2000, modified with mechanical properties of Grey Pro.
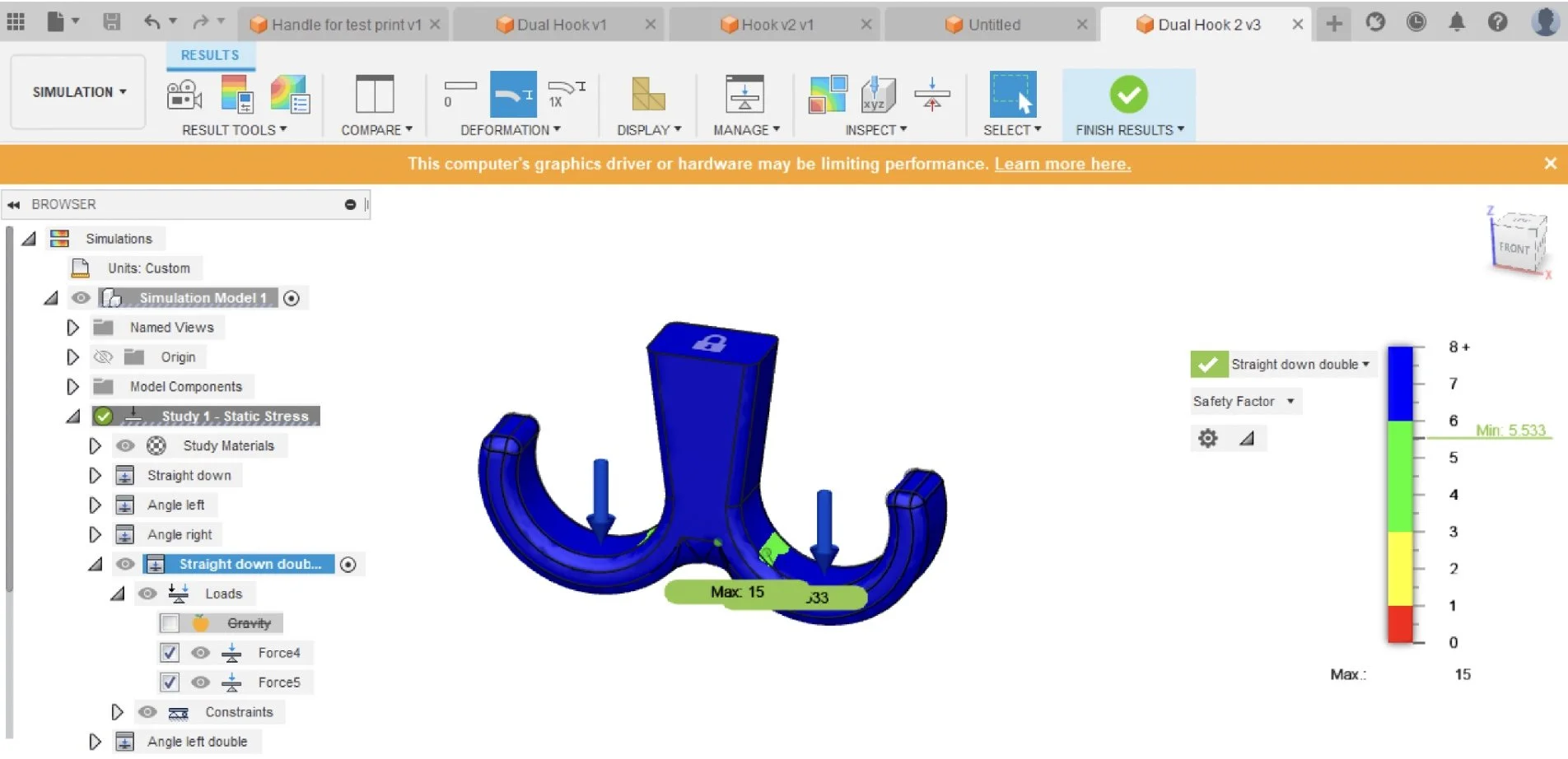
Dual hook simulation used the same loading conditions as the single hook, applied on both sides of the double hook simultaneously. Minimum Factor of Safety was 5.5.
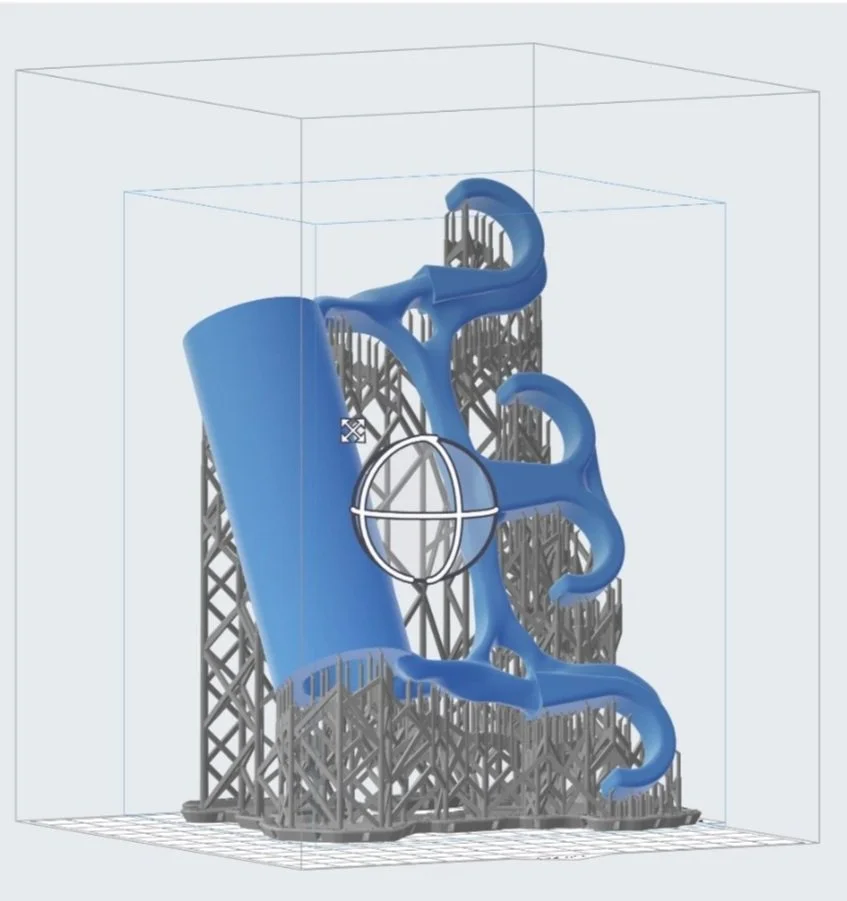
Generative Design
Loading Conditions
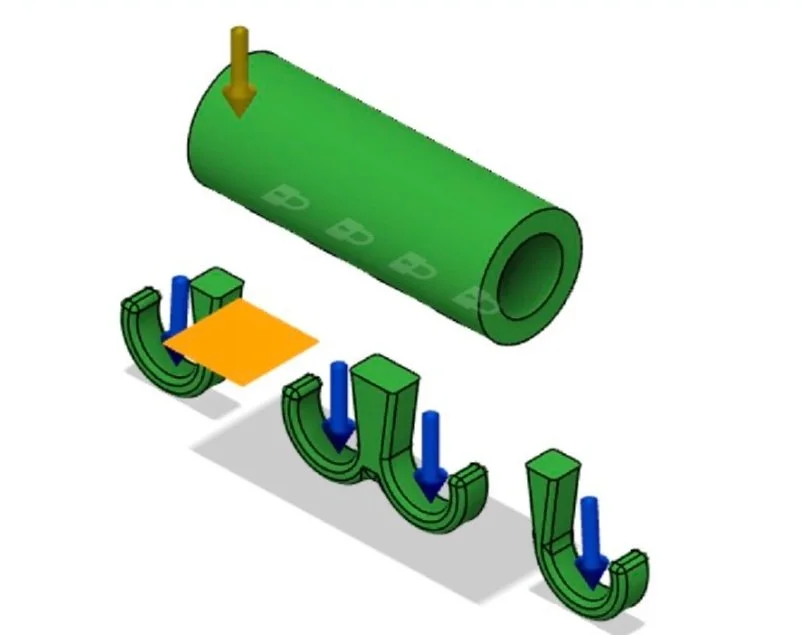
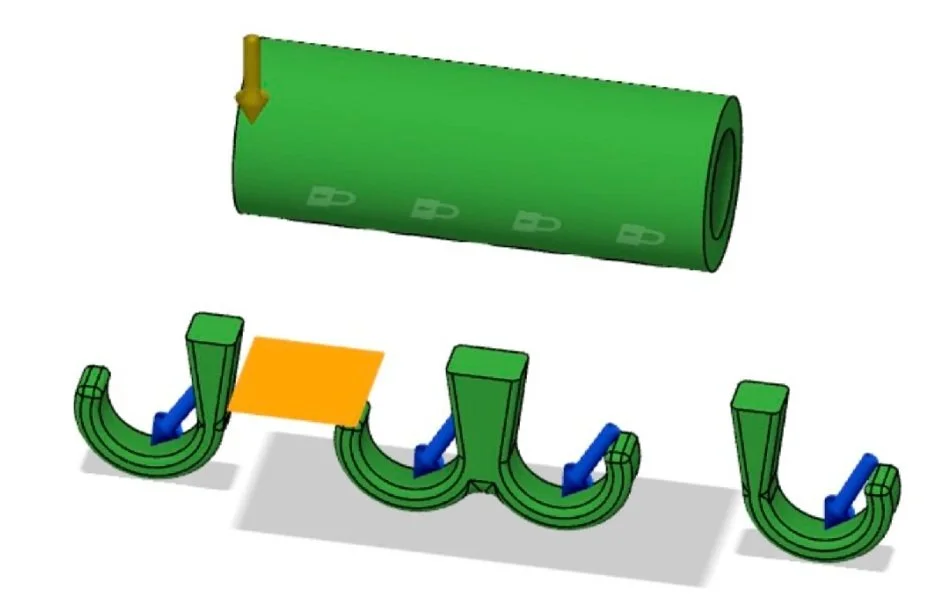
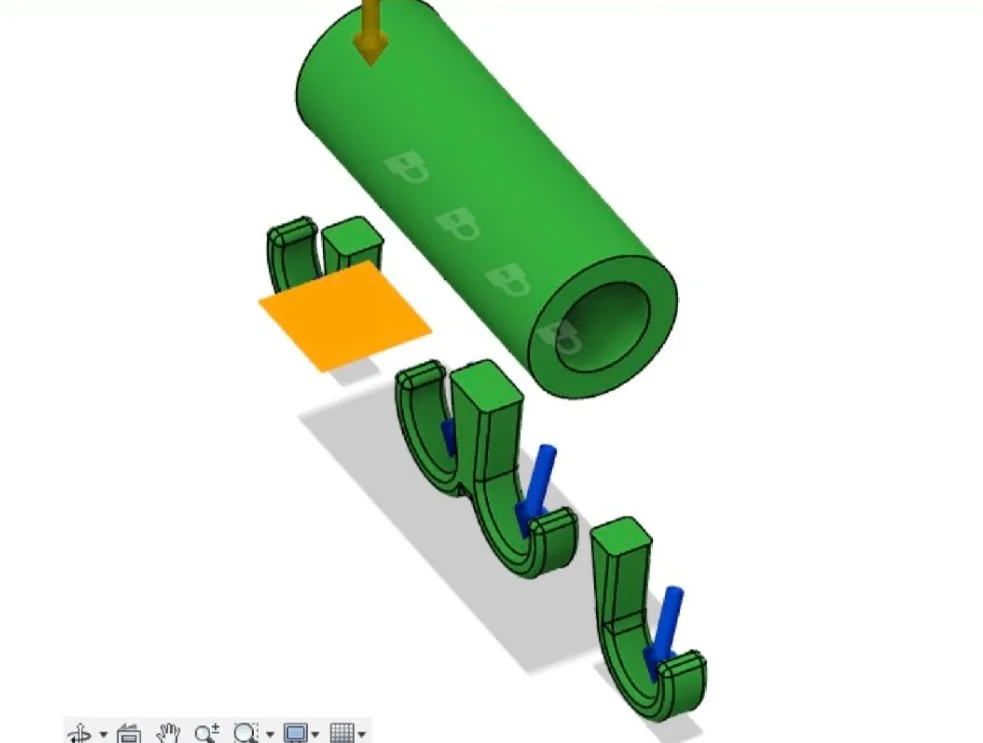
A number of loading conditions were applied to the generative design simulation in order to account for different ways that the handle might be used. The green pieces represent preserved geometry, and each blue arrow represents a 26.7 N load. Objectives for the generative design were set to minimize mass with a target safety factor of 3.
Loading condition 1
Loading condition 4

Loading condition 6
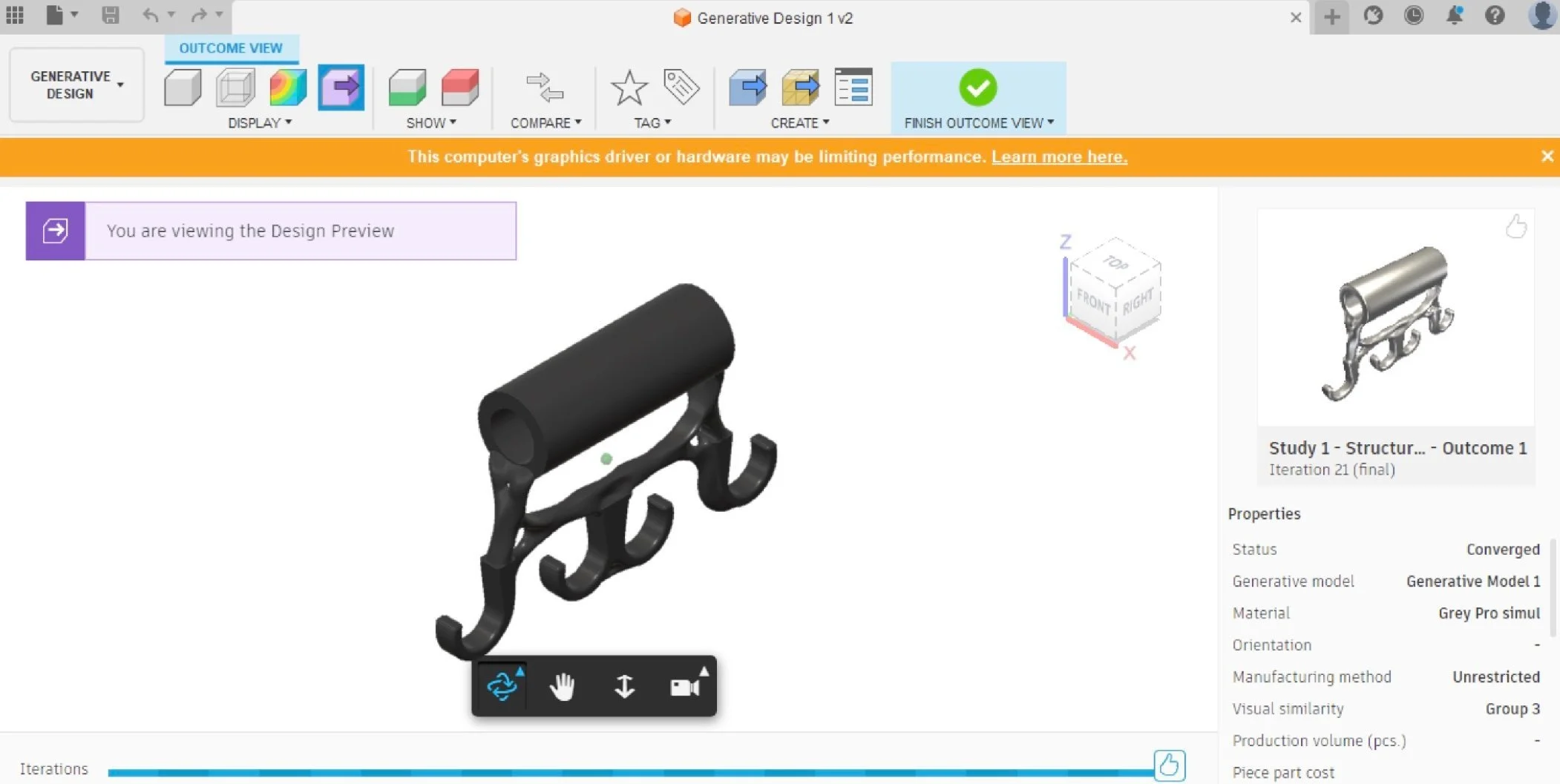
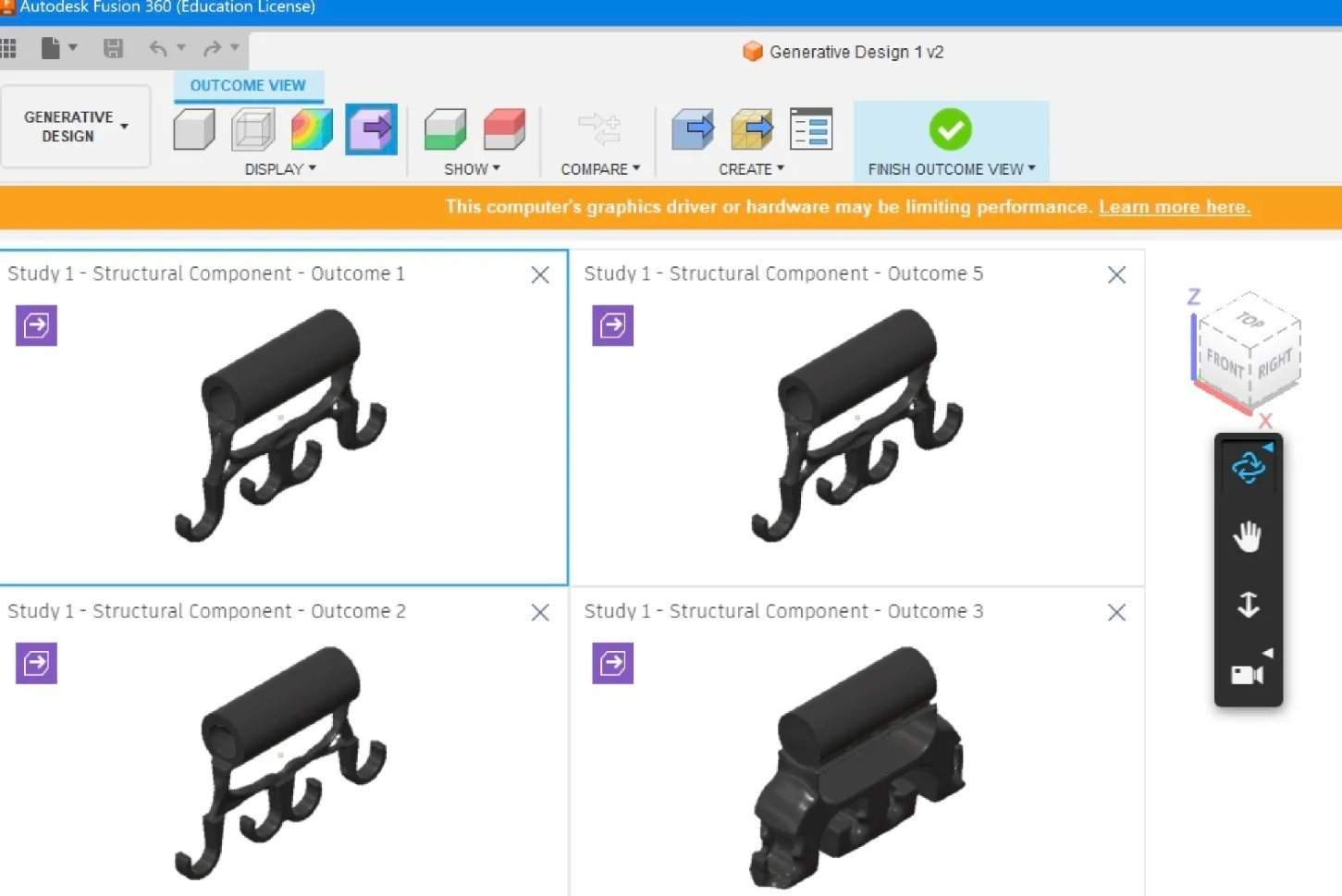
Simulation Outcomes
I chose to pursue Outcome 1 because it is tied for the lightest design, and features one of the highest factors of safety. This outcome used unrestricted manufacturing, has a mass of 93 g, and has a minimum factor of safety of 4.7.
Loading condition 5

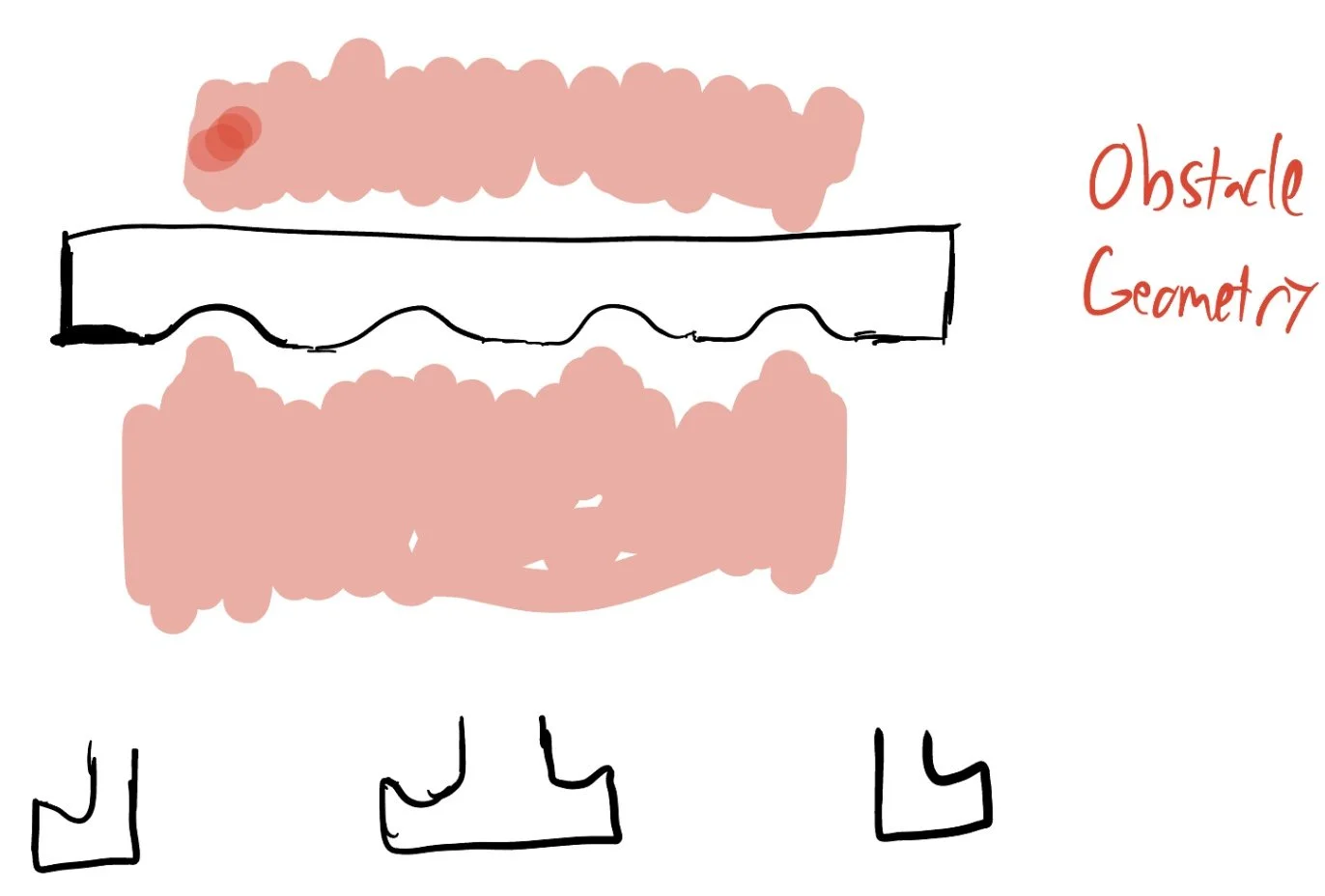
Obstacle Geometry
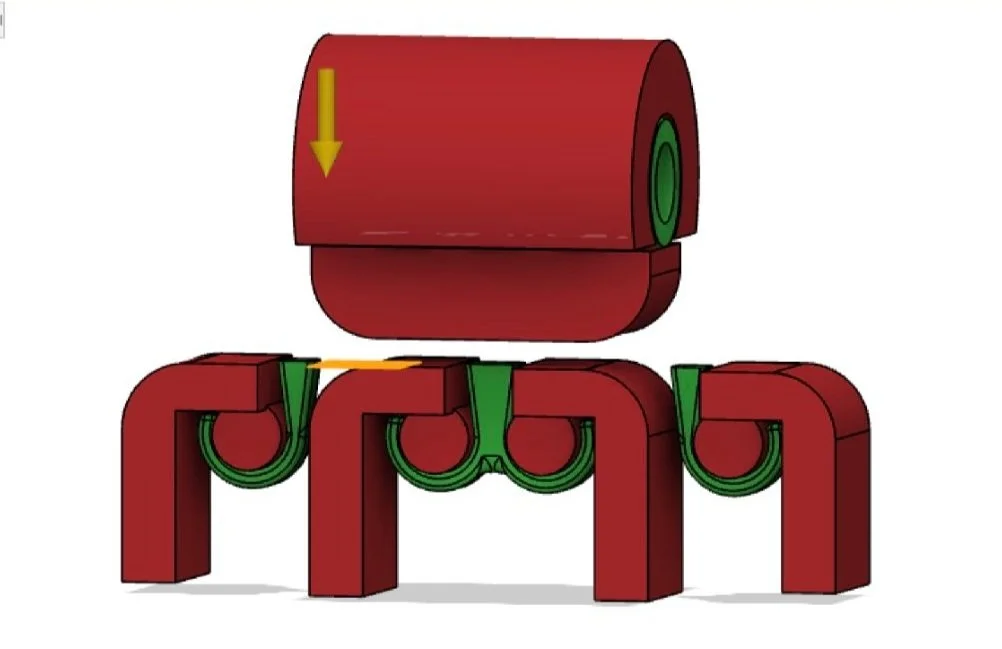
Obstacle geometries are represented in red. These geometries represent where the hand holds the handle, and where the bags will hand from the hooks.
After running the simulation, these are the top 4 results
Loading condition 3
Loading condition 2
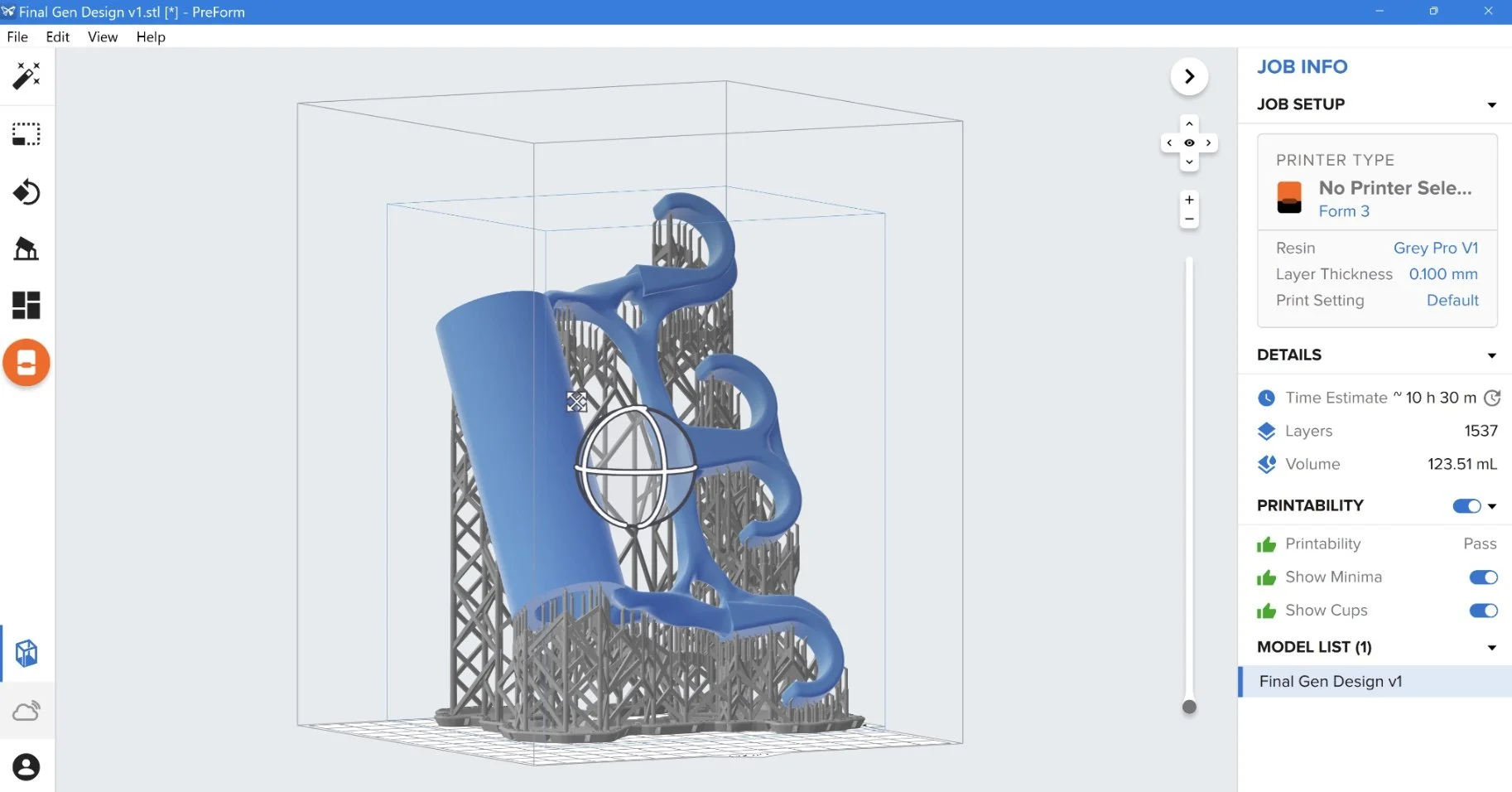
Final Printed Product
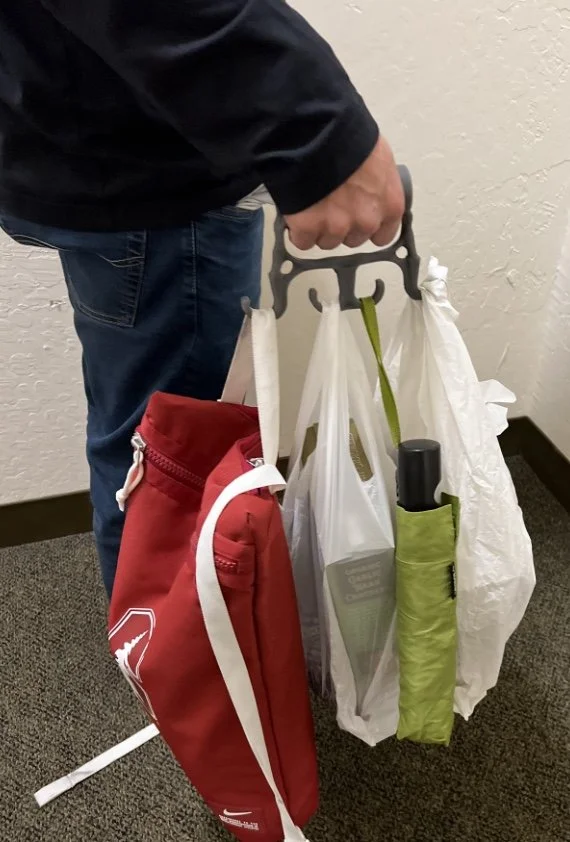
This design worked pretty much exactly the way that I intended it to. Not only is it light, but it feels extremely strong and easily holds multiple bags and items without any noticeable deflection. The final product has a much more ergonomic grip than the first handle prototype, and the Grey Pro material also features a nicer tactile grip than PLA. I feel that Grey Pro was a great material choice for this design. It is not too brittle, and has a small amount of give when supporting a large force, but also does not flex as much as Tough 2000.
During the development of this design, I became much more confident in generative design, and my ability to utilize generative design for my projects. This was my first time actually printing something that I had created with generative design, and I was pleasantly surprised at the strength of the skinny connections that the solver generated. I also noticed that, even though I ran simple static simulations on the hooks, the generative design solver added material to the hooks to strengthen them. I attribute this to the many different load conditions I set, which may have captured unexpected force relationships.
For future work, I would have began with a handle with a much thinner wall, and then let the generative design attempt to strengthen the handle using only as much material as is necessary. This would help to make the final product even lighter than it currently is.

Skills Learned
-
This project (and course overall) helped teach me about playing to the strengths of additive manufacturing. For example the ergonomic and geometrically complex nature of this handle would have made it extremely difficult to machine via subtractive methods. Instead I was able to quickly and cheaply manufacture the geometry directly from the model, without any specialized tooling or multiple parts.
-
This project forced me to consider the wide range of possible materials I could have used from SLA and FDM printers. Considering users, strength and stiffness requirements, and impact resistance were all things that I considered when finalizing my design.
-
Through the course I learned about algorithmic modeling methods such as shape optimization and generative design. I got to try my hand at these methods during this project by defining constraints and boundary conditions and applying appropriate loading conditions to yield best results.