

ME 170a/b Senior Capstone
Design Objective
In partnership with Volkswagen, I worked with my four person team to develop a mechanical system to allow people in wheelchairs to enter an autonomous vehicle, secure themselves, and exit the vehicle without additional assistance.
Over the two-quarter course, we utilized industry development processes through establishing requirements, narrowing a top concept, implementation, and testing.
Our Final Design included a four-bar actuated ramp deployment system that could be stored flush within a vehicle floor, and a spring-loaded tooth securement system.
Final Report:
Robertson, T., Bernardo, J., Briones, B., and Athanasopoulos Yogo, T. (2023). Accessibility in an Autonomous Future. Stanford Digital Repository. Available at https://purl.stanford.edu/qw824kr4672. https://doi.org/10.25740/qw824kr4672
Project Duration:
09/2022 - 03/2023
The Problem
As autonomous vehicle technologies improve, a future without human drivers draws nearer. However, the current state of wheelchair access to vehicles overwhelmingly relies on a human driver to actuate entry, exit, and securement methods. Current concept autonomous vehicles are imagined to be used for personal or public transportation, however they are net designed with accessibility services, leaving wheelchair users excluded from these products.
The Mission
Develop a mechanical system that considers people in wheelchairs as key users of autonomous vehicles, and allows for assistance-free and wheelchair-accessible ingress, egress, and securement for these vehicles.
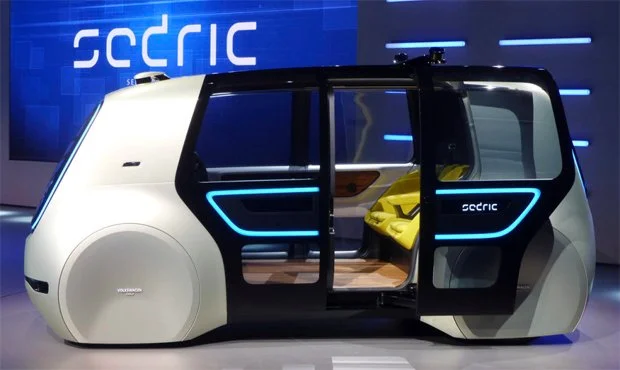
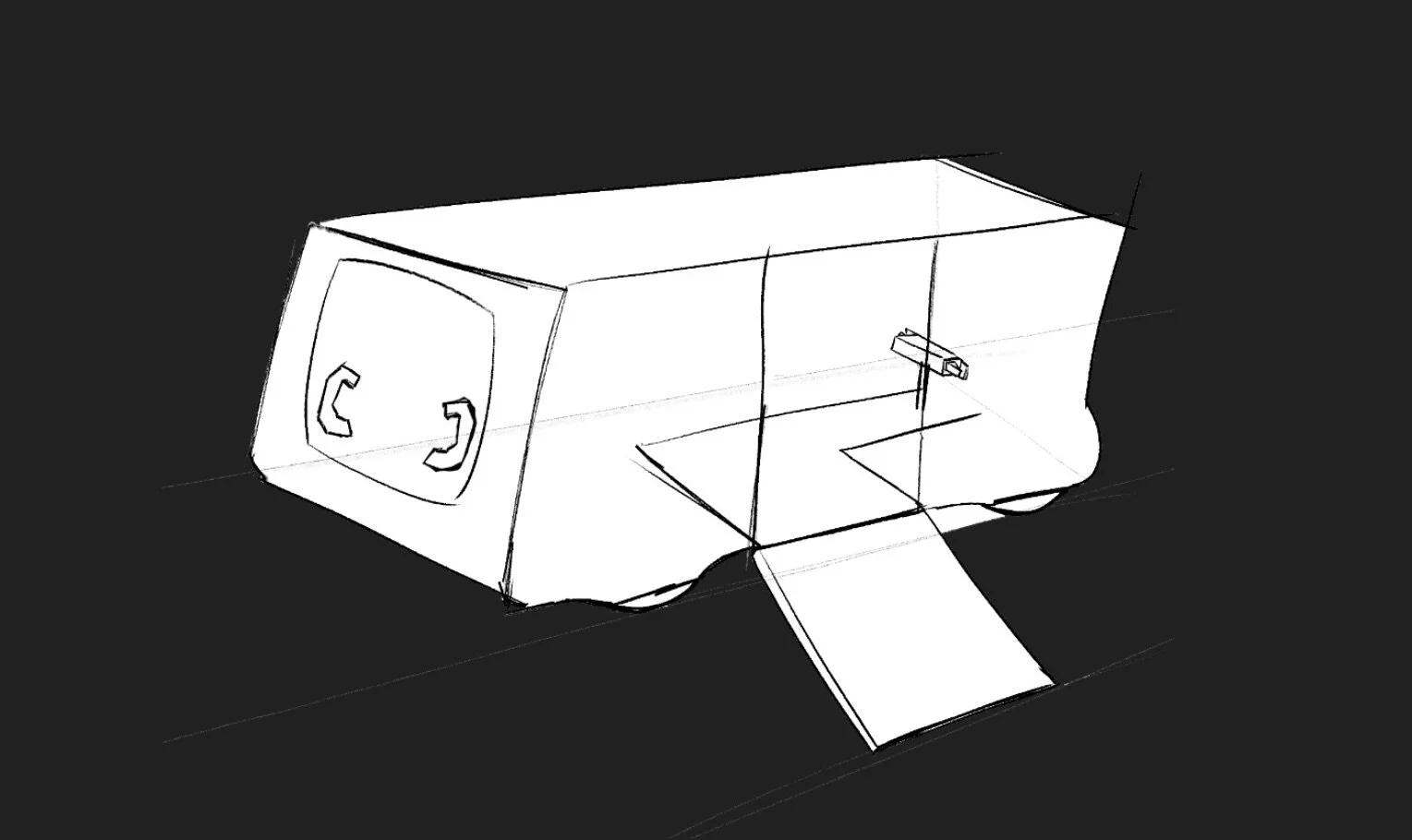
Concept
Our team was given the Volkswagen Sedric concept vehicle as a reference vehicle to base our design around. We considered the physical dimensions and interior layout when brainstorming our design.
Our design allows for the user to enter/exit via a deployable ramp, and then turn and back into a spring actuated securement system which will hold onto the frame of the wheelchair
User and Engineering Requirements
Through conversations with our Liaison and extensive user research we refined the scope of our project down to a list of high priority user requirements. We quantified these benchmarks with a list of engineering requirements that we used to inform our design and perform tests against.
-
The system should allow wheelchair users to use the vehicle without assistance with another human, and should allow for a comfortable and simple riding experience. Allowing wheelchair users to use autonomous vehicles independently is important for feelings of privacy, autonomy, and freedom for wheelchair users.
-
Wheelchair accessibility is tightly regulated by the ADA, and as such our design had to conform around various specifications. These requirements constrained size, FOS, and operation of our design
-
We also had to consider the different conditions that the system will be subjected to as part of a vehicle. FOS calculations and testing were performed considering weather conditions and vehicle accelerations
-
Reliability is important not only for the safety of the user, but also the user’s property. It was imperative that our system operated properly, and did not damage the wheelchair under normal use
-
In addition to conformance to the ADA, it was also important that we conformed to the general dimensions and layout of the Sedric concept car
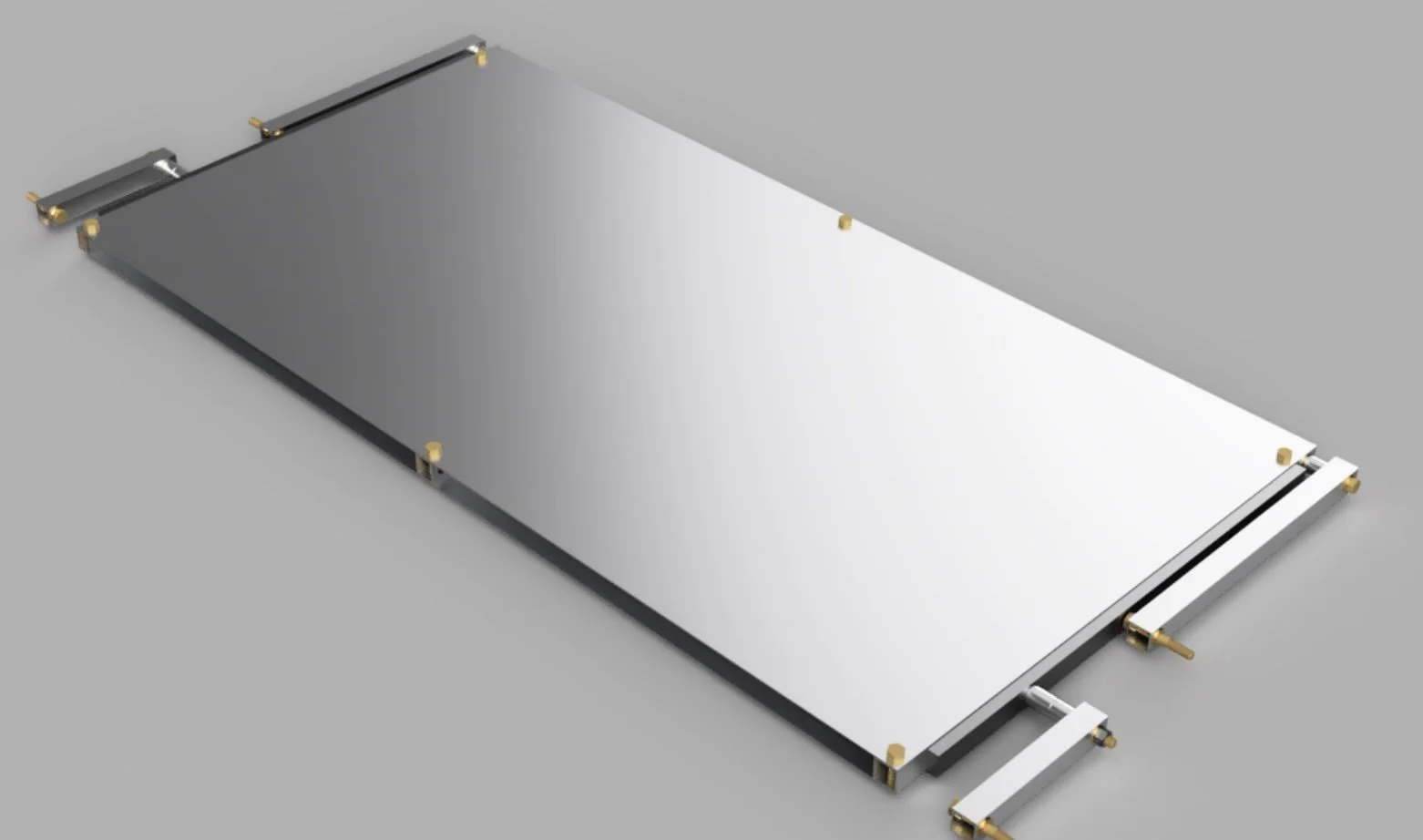
Ramp Actuation
The design of our ramp’s deployment mechanism uses a modified four-bar system to enable a wide range of motion between full concealment and full deployment. This mechanism provides our design with an extremely low-profile footprint and a smooth, reliable motion on deployment. Using a sliding joint along the side of the ramp also permitted our design to be more versatile, providing the ramp with a greater range of motion to accommodate different curb heights and ground clearances.
Stowed State
The ramp is flush with the wood (representing the vehicle floor) to minimize footprint within cabin space

Deployed State
The ramp extends to create an ADA compliant entry/exit with minimal path of obstruction during actuation

Variability
The sliding joint of the actuation system allows the ramp to extend to varying curb heights

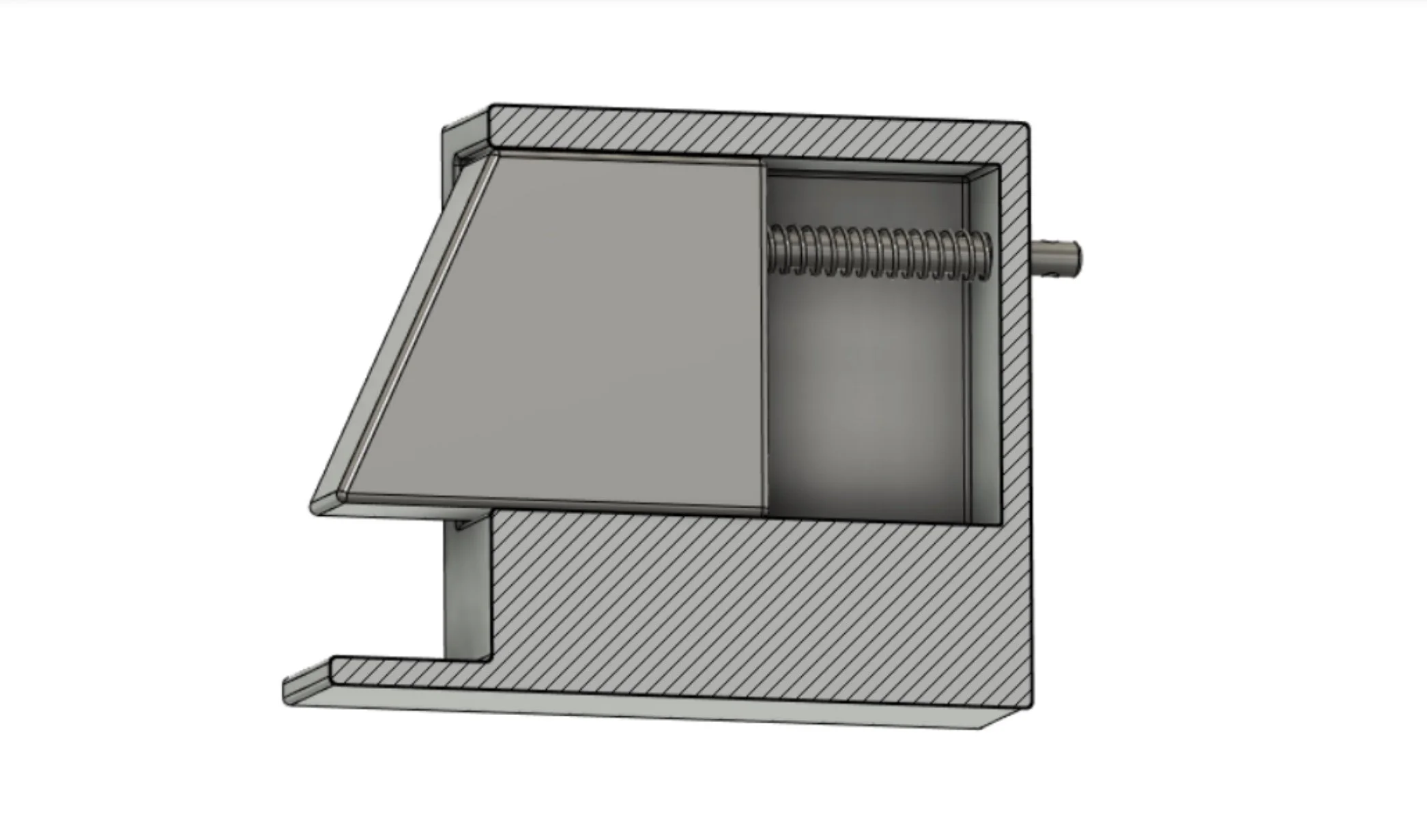
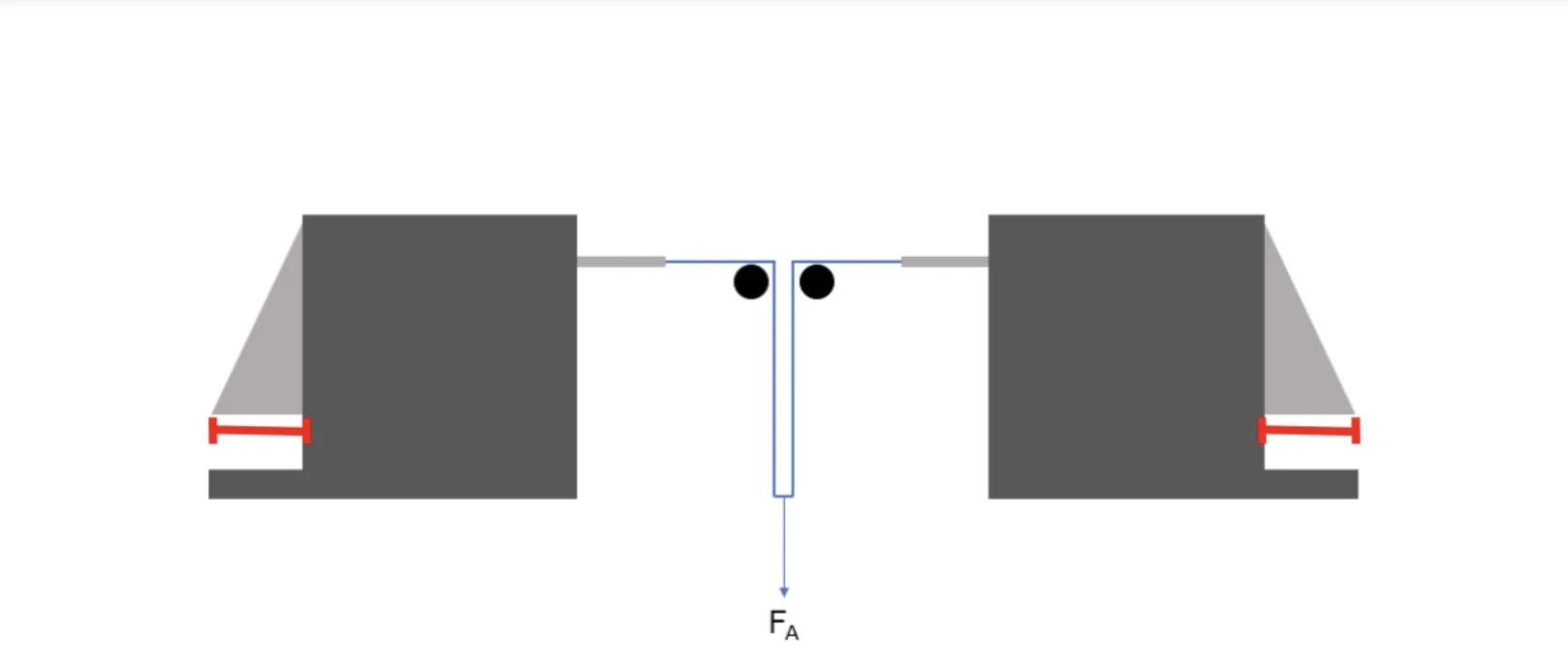
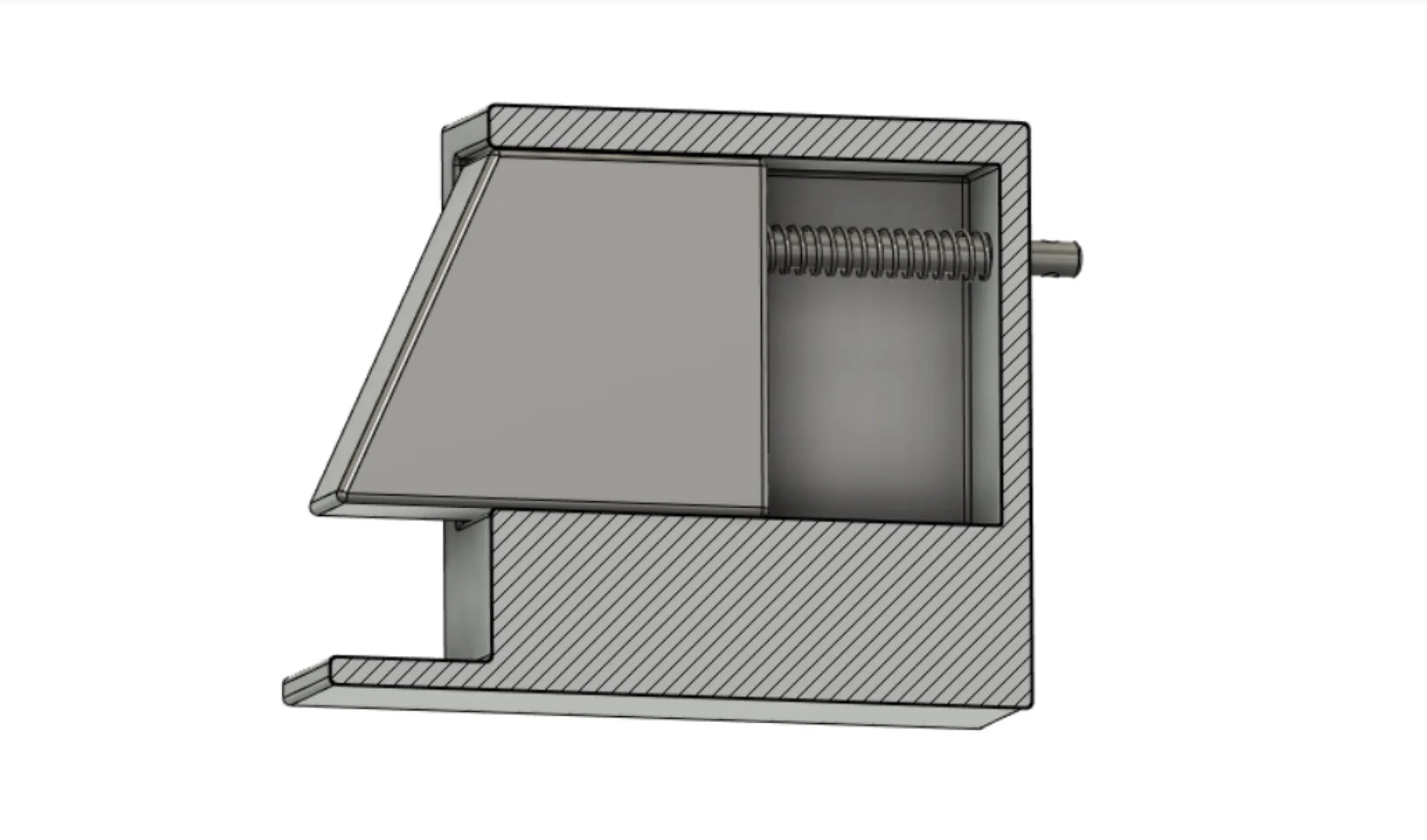
Wheelchair Securement
The securement mechanism uses two outward-facing spring-loaded teeth to keep the frame of the wheelchair solidly in place. The teeth are constructed entirely from aluminum 6061, making them both light and strong. They are propped up on aluminum sheet metal and square tubing, ensuring consistent spacing between the teeth and height appropriate to the wheelchair’s frame. Each of these teeth is connected to a cable-based actuation mechanism, which is controlled by a pull handle for easy release from securement.
Aluminum Body
Casing and tooth created from aluminum 6061 using CNC for tolerance precision and strength
Single Point Release
Release actuation confined to single pull cable to comply with ADA required single-handed operation for emergency release
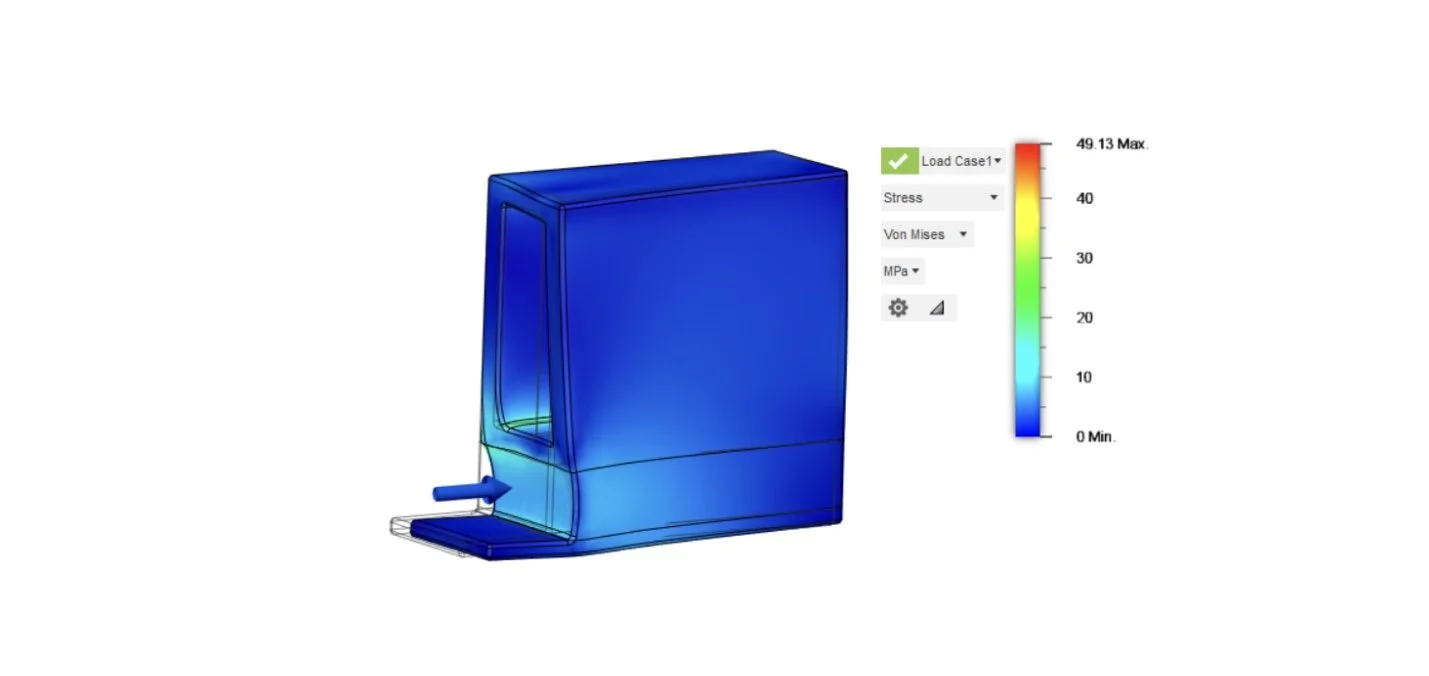
Force Requirement
The securement is designed to withstand 2800 N of lateral load and 1700 N of axial load, simulating expected driving accelerations
Skills Learned

-
This project taught me about the importance of setting user and engineering requirements in order to constrain an open-ended project. Determining the most important requirements gave us clear quantifiable metrics to compare prototypes against and inform key design choices. Our requirement list existed as a working document which we continually referenced throughout all stages of the design process.
-
I learned how to use FMEA as a tool for identifying, assessing, and mitigating risks associated with a design. I learned to prioritize risks based on severity, occurrence, and detectability. This helped us determine the most effective design changes given limited resources.
-
I learned how to design and execute experiments that could confirm or deny our designs against our set requirements. These experiments allowed us to exercise resourcefulness and thoroughness.
-
Through designing the ramp actuation, we learned a lot about the intricacies of four-bar systems. We performed inverse kinematics to constrain our ramp to a specific deployment path and determine the number of motors necessary to manipulate the ramp.